


注意
点击此处下载完整示例代码
训练一个玩马力欧的强化学习智能体¶
创建日期:2020 年 12 月 17 日 | 最后更新:2024 年 2 月 5 日 | 最后验证:未验证
作者: Yuansong Feng, Suraj Subramanian, Howard Wang, Steven Guo.
本教程将引导你了解深度强化学习的基础知识。学完本教程,你将能够实现一个由 AI 驱动的马力欧(使用双深度 Q 网络),它能够自己玩游戏。
虽然本教程不需要强化学习的先验知识,但你可以通过这些强化学习概念来熟悉自己,并把这份方便的备忘单作为你的参考。完整代码可在此处查看。

%%bash
pip install gym-super-mario-bros==7.4.0
pip install tensordict==0.3.0
pip install torchrl==0.3.0
import torch
from torch import nn
from torchvision import transforms as T
from PIL import Image
import numpy as np
from pathlib import Path
from collections import deque
import random, datetime, os
# Gym is an OpenAI toolkit for RL
import gym
from gym.spaces import Box
from gym.wrappers import FrameStack
# NES Emulator for OpenAI Gym
from nes_py.wrappers import JoypadSpace
# Super Mario environment for OpenAI Gym
import gym_super_mario_bros
from tensordict import TensorDict
from torchrl.data import TensorDictReplayBuffer, LazyMemmapStorage
强化学习定义¶
环境 智能体与之交互并从中学习的世界。
动作 \(a\) : 智能体对环境做出响应的方式。所有可能动作的集合称为动作空间。
状态 \(s\) : 环境当前的特征。环境可能处于的所有状态的集合称为状态空间。
奖励 \(r\) : 奖励是环境对智能体的关键反馈。它是驱动智能体学习和改变其未来动作的动力。跨多个时间步长的奖励总和称为回报。
最优动作价值函数 \(Q^*(s,a)\) : 给出了从状态 \(s\) 开始,采取任意动作 \(a\),然后在未来每个时间步长都采取使回报最大化的动作时,所期望的回报。\(Q\) 可以说代表了动作在某个状态下的“质量”。我们尝试近似这个函数。
环境¶
初始化环境¶
在马力欧游戏中,环境由水管、蘑菇和其他组成部分构成。
当马力欧采取动作时,环境会返回改变后的(下一个)状态、奖励和其他信息作为响应。
# Initialize Super Mario environment (in v0.26 change render mode to 'human' to see results on the screen)
if gym.__version__ < '0.26':
env = gym_super_mario_bros.make("SuperMarioBros-1-1-v0", new_step_api=True)
else:
env = gym_super_mario_bros.make("SuperMarioBros-1-1-v0", render_mode='rgb', apply_api_compatibility=True)
# Limit the action-space to
# 0. walk right
# 1. jump right
env = JoypadSpace(env, [["right"], ["right", "A"]])
env.reset()
next_state, reward, done, trunc, info = env.step(action=0)
print(f"{next_state.shape},\n {reward},\n {done},\n {info}")
预处理环境¶
环境数据在 next_state 中返回给智能体。如上所示,每个状态由一个大小为 [3, 240, 256] 的数组表示。通常,这比我们的智能体所需的信息更多;例如,马力欧的动作并不取决于水管或天空的颜色!
我们使用包装器 (Wrappers) 在将环境数据发送给智能体之前对其进行预处理。
GrayScaleObservation 是一种常见的包装器,用于将 RGB 图像转换为灰度图像;这样做可以在不丢失有用信息的情况下减小状态表示的大小。现在每个状态的大小为:[1, 240, 256]
ResizeObservation 将每个观测结果下采样为一个方形图像。新的大小为:[1, 84, 84]
SkipFrame 是一个继承自 gym.Wrapper 并实现了 step() 函数的自定义包装器。由于连续帧变化不大,我们可以跳过 n 个中间帧而不会丢失太多信息。第 n 帧累积了跳过的每一帧中获得的奖励。
FrameStack 是一个包装器,它允许我们将环境中连续的帧压缩到单个观测点,以馈送给我们的学习模型。通过这种方式,我们可以根据马力欧在前几个帧中的移动方向来判断他是落地还是跳跃。
class SkipFrame(gym.Wrapper):
def __init__(self, env, skip):
"""Return only every `skip`-th frame"""
super().__init__(env)
self._skip = skip
def step(self, action):
"""Repeat action, and sum reward"""
total_reward = 0.0
for i in range(self._skip):
# Accumulate reward and repeat the same action
obs, reward, done, trunk, info = self.env.step(action)
total_reward += reward
if done:
break
return obs, total_reward, done, trunk, info
class GrayScaleObservation(gym.ObservationWrapper):
def __init__(self, env):
super().__init__(env)
obs_shape = self.observation_space.shape[:2]
self.observation_space = Box(low=0, high=255, shape=obs_shape, dtype=np.uint8)
def permute_orientation(self, observation):
# permute [H, W, C] array to [C, H, W] tensor
observation = np.transpose(observation, (2, 0, 1))
observation = torch.tensor(observation.copy(), dtype=torch.float)
return observation
def observation(self, observation):
observation = self.permute_orientation(observation)
transform = T.Grayscale()
observation = transform(observation)
return observation
class ResizeObservation(gym.ObservationWrapper):
def __init__(self, env, shape):
super().__init__(env)
if isinstance(shape, int):
self.shape = (shape, shape)
else:
self.shape = tuple(shape)
obs_shape = self.shape + self.observation_space.shape[2:]
self.observation_space = Box(low=0, high=255, shape=obs_shape, dtype=np.uint8)
def observation(self, observation):
transforms = T.Compose(
[T.Resize(self.shape, antialias=True), T.Normalize(0, 255)]
)
observation = transforms(observation).squeeze(0)
return observation
# Apply Wrappers to environment
env = SkipFrame(env, skip=4)
env = GrayScaleObservation(env)
env = ResizeObservation(env, shape=84)
if gym.__version__ < '0.26':
env = FrameStack(env, num_stack=4, new_step_api=True)
else:
env = FrameStack(env, num_stack=4)
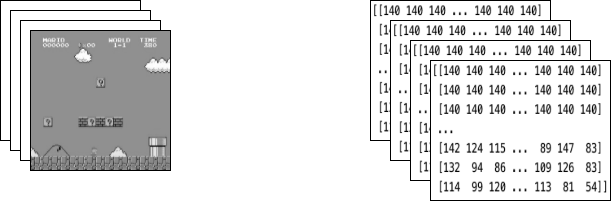
将上述包装器应用于环境后,最终的包装状态由 4 个堆叠在一起的灰度连续帧组成,如左侧图像所示。每次马力欧采取动作时,环境都会返回一个具有这种结构的状态作为响应。该结构由一个大小为 [4, 84, 84] 的 3-D 数组表示。
智能体¶
我们创建一个名为 Mario 的类来表示游戏中的智能体。马力欧应该能够做到
根据当前(环境)状态,按照最优动作策略行动。
记住经验。经验 = (当前状态, 当前动作, 奖励, 下一个状态)。马力欧会缓存并稍后回忆他的经验,以更新他的动作策略。
随着时间推移学习更好的动作策略
class Mario:
def __init__():
pass
def act(self, state):
"""Given a state, choose an epsilon-greedy action"""
pass
def cache(self, experience):
"""Add the experience to memory"""
pass
def recall(self):
"""Sample experiences from memory"""
pass
def learn(self):
"""Update online action value (Q) function with a batch of experiences"""
pass
在接下来的部分中,我们将填充马力欧的参数并定义他的函数。
行动¶
对于任何给定的状态,智能体可以选择执行最优动作(利用)或随机动作(探索)。
马力欧以 self.exploration_rate 的概率随机探索;当他选择利用时,他依赖 MarioNet(在 学习 部分实现)来提供最优动作。
class Mario:
def __init__(self, state_dim, action_dim, save_dir):
self.state_dim = state_dim
self.action_dim = action_dim
self.save_dir = save_dir
self.device = "cuda" if torch.cuda.is_available() else "cpu"
# Mario's DNN to predict the most optimal action - we implement this in the Learn section
self.net = MarioNet(self.state_dim, self.action_dim).float()
self.net = self.net.to(device=self.device)
self.exploration_rate = 1
self.exploration_rate_decay = 0.99999975
self.exploration_rate_min = 0.1
self.curr_step = 0
self.save_every = 5e5 # no. of experiences between saving Mario Net
def act(self, state):
"""
Given a state, choose an epsilon-greedy action and update value of step.
Inputs:
state(``LazyFrame``): A single observation of the current state, dimension is (state_dim)
Outputs:
``action_idx`` (``int``): An integer representing which action Mario will perform
"""
# EXPLORE
if np.random.rand() < self.exploration_rate:
action_idx = np.random.randint(self.action_dim)
# EXPLOIT
else:
state = state[0].__array__() if isinstance(state, tuple) else state.__array__()
state = torch.tensor(state, device=self.device).unsqueeze(0)
action_values = self.net(state, model="online")
action_idx = torch.argmax(action_values, axis=1).item()
# decrease exploration_rate
self.exploration_rate *= self.exploration_rate_decay
self.exploration_rate = max(self.exploration_rate_min, self.exploration_rate)
# increment step
self.curr_step += 1
return action_idx
缓存和回忆¶
这两个函数作为马力欧的“记忆”过程。
cache():每次马力欧执行动作时,他都会将 经验 存储到他的记忆中。他的经验包括当前的状态、执行的动作、从动作获得的奖励、下一个状态以及游戏是否结束。
recall():马力欧从他的记忆中随机抽取一批经验,并使用这些经验来学习游戏。
class Mario(Mario): # subclassing for continuity
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.memory = TensorDictReplayBuffer(storage=LazyMemmapStorage(100000, device=torch.device("cpu")))
self.batch_size = 32
def cache(self, state, next_state, action, reward, done):
"""
Store the experience to self.memory (replay buffer)
Inputs:
state (``LazyFrame``),
next_state (``LazyFrame``),
action (``int``),
reward (``float``),
done(``bool``))
"""
def first_if_tuple(x):
return x[0] if isinstance(x, tuple) else x
state = first_if_tuple(state).__array__()
next_state = first_if_tuple(next_state).__array__()
state = torch.tensor(state)
next_state = torch.tensor(next_state)
action = torch.tensor([action])
reward = torch.tensor([reward])
done = torch.tensor([done])
# self.memory.append((state, next_state, action, reward, done,))
self.memory.add(TensorDict({"state": state, "next_state": next_state, "action": action, "reward": reward, "done": done}, batch_size=[]))
def recall(self):
"""
Retrieve a batch of experiences from memory
"""
batch = self.memory.sample(self.batch_size).to(self.device)
state, next_state, action, reward, done = (batch.get(key) for key in ("state", "next_state", "action", "reward", "done"))
return state, next_state, action.squeeze(), reward.squeeze(), done.squeeze()
学习¶
马力欧内部使用DDQN 算法。DDQN 使用两个卷积神经网络 (ConvNets) - \(Q_{online}\) 和 \(Q_{target}\) - 它们独立地近似最优动作价值函数。
在我们的实现中,我们在 \(Q_{online}\) 和 \(Q_{target}\) 之间共享特征生成器 features,但为它们各自维护独立的 FC 分类器。\(\theta_{target}\)(\(Q_{target}\) 的参数)被冻结,以防止通过反向传播进行更新。相反,它会定期与 \(\theta_{online}\) 同步(稍后详细介绍)。
神经网络¶
class MarioNet(nn.Module):
"""mini CNN structure
input -> (conv2d + relu) x 3 -> flatten -> (dense + relu) x 2 -> output
"""
def __init__(self, input_dim, output_dim):
super().__init__()
c, h, w = input_dim
if h != 84:
raise ValueError(f"Expecting input height: 84, got: {h}")
if w != 84:
raise ValueError(f"Expecting input width: 84, got: {w}")
self.online = self.__build_cnn(c, output_dim)
self.target = self.__build_cnn(c, output_dim)
self.target.load_state_dict(self.online.state_dict())
# Q_target parameters are frozen.
for p in self.target.parameters():
p.requires_grad = False
def forward(self, input, model):
if model == "online":
return self.online(input)
elif model == "target":
return self.target(input)
def __build_cnn(self, c, output_dim):
return nn.Sequential(
nn.Conv2d(in_channels=c, out_channels=32, kernel_size=8, stride=4),
nn.ReLU(),
nn.Conv2d(in_channels=32, out_channels=64, kernel_size=4, stride=2),
nn.ReLU(),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.Flatten(),
nn.Linear(3136, 512),
nn.ReLU(),
nn.Linear(512, output_dim),
)
TD 估计与 TD 目标¶
学习过程中涉及两个值
TD 估计 - 给定状态 \(s\) 的预测最优 \(Q^*\)
TD 目标 - 当前奖励和下一个状态 \(s'\) 中的估计 \(Q^*\) 的聚合
因为我们不知道下一个动作 \(a'\) 是什么,所以我们使用在下一个状态 \(s'\) 中使 \(Q_{online}\) 最大化的动作 \(a'\)。
注意,我们在 td_target() 上使用了 @torch.no_grad() 装饰器,以在此处禁用梯度计算(因为我们不需要对 \(\theta_{target}\) 进行反向传播)。
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.gamma = 0.9
def td_estimate(self, state, action):
current_Q = self.net(state, model="online")[
np.arange(0, self.batch_size), action
] # Q_online(s,a)
return current_Q
@torch.no_grad()
def td_target(self, reward, next_state, done):
next_state_Q = self.net(next_state, model="online")
best_action = torch.argmax(next_state_Q, axis=1)
next_Q = self.net(next_state, model="target")[
np.arange(0, self.batch_size), best_action
]
return (reward + (1 - done.float()) * self.gamma * next_Q).float()
更新模型¶
当马力欧从他的重放缓冲区中采样输入时,我们计算 \(TD_t\) 和 \(TD_e\),并通过反向传播这个损失来更新 \(Q_{online}\) 的参数 \(\theta_{online}\)(\(\alpha\) 是传递给 optimizer 的学习率 lr)
\(\theta_{target}\) 不通过反向传播更新。相反,我们定期将 \(\theta_{online}\) 复制到 \(\theta_{target}\)
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.optimizer = torch.optim.Adam(self.net.parameters(), lr=0.00025)
self.loss_fn = torch.nn.SmoothL1Loss()
def update_Q_online(self, td_estimate, td_target):
loss = self.loss_fn(td_estimate, td_target)
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
return loss.item()
def sync_Q_target(self):
self.net.target.load_state_dict(self.net.online.state_dict())
保存检查点¶
class Mario(Mario):
def save(self):
save_path = (
self.save_dir / f"mario_net_{int(self.curr_step // self.save_every)}.chkpt"
)
torch.save(
dict(model=self.net.state_dict(), exploration_rate=self.exploration_rate),
save_path,
)
print(f"MarioNet saved to {save_path} at step {self.curr_step}")
整合所有部分¶
class Mario(Mario):
def __init__(self, state_dim, action_dim, save_dir):
super().__init__(state_dim, action_dim, save_dir)
self.burnin = 1e4 # min. experiences before training
self.learn_every = 3 # no. of experiences between updates to Q_online
self.sync_every = 1e4 # no. of experiences between Q_target & Q_online sync
def learn(self):
if self.curr_step % self.sync_every == 0:
self.sync_Q_target()
if self.curr_step % self.save_every == 0:
self.save()
if self.curr_step < self.burnin:
return None, None
if self.curr_step % self.learn_every != 0:
return None, None
# Sample from memory
state, next_state, action, reward, done = self.recall()
# Get TD Estimate
td_est = self.td_estimate(state, action)
# Get TD Target
td_tgt = self.td_target(reward, next_state, done)
# Backpropagate loss through Q_online
loss = self.update_Q_online(td_est, td_tgt)
return (td_est.mean().item(), loss)
日志记录¶
import numpy as np
import time, datetime
import matplotlib.pyplot as plt
class MetricLogger:
def __init__(self, save_dir):
self.save_log = save_dir / "log"
with open(self.save_log, "w") as f:
f.write(
f"{'Episode':>8}{'Step':>8}{'Epsilon':>10}{'MeanReward':>15}"
f"{'MeanLength':>15}{'MeanLoss':>15}{'MeanQValue':>15}"
f"{'TimeDelta':>15}{'Time':>20}\n"
)
self.ep_rewards_plot = save_dir / "reward_plot.jpg"
self.ep_lengths_plot = save_dir / "length_plot.jpg"
self.ep_avg_losses_plot = save_dir / "loss_plot.jpg"
self.ep_avg_qs_plot = save_dir / "q_plot.jpg"
# History metrics
self.ep_rewards = []
self.ep_lengths = []
self.ep_avg_losses = []
self.ep_avg_qs = []
# Moving averages, added for every call to record()
self.moving_avg_ep_rewards = []
self.moving_avg_ep_lengths = []
self.moving_avg_ep_avg_losses = []
self.moving_avg_ep_avg_qs = []
# Current episode metric
self.init_episode()
# Timing
self.record_time = time.time()
def log_step(self, reward, loss, q):
self.curr_ep_reward += reward
self.curr_ep_length += 1
if loss:
self.curr_ep_loss += loss
self.curr_ep_q += q
self.curr_ep_loss_length += 1
def log_episode(self):
"Mark end of episode"
self.ep_rewards.append(self.curr_ep_reward)
self.ep_lengths.append(self.curr_ep_length)
if self.curr_ep_loss_length == 0:
ep_avg_loss = 0
ep_avg_q = 0
else:
ep_avg_loss = np.round(self.curr_ep_loss / self.curr_ep_loss_length, 5)
ep_avg_q = np.round(self.curr_ep_q / self.curr_ep_loss_length, 5)
self.ep_avg_losses.append(ep_avg_loss)
self.ep_avg_qs.append(ep_avg_q)
self.init_episode()
def init_episode(self):
self.curr_ep_reward = 0.0
self.curr_ep_length = 0
self.curr_ep_loss = 0.0
self.curr_ep_q = 0.0
self.curr_ep_loss_length = 0
def record(self, episode, epsilon, step):
mean_ep_reward = np.round(np.mean(self.ep_rewards[-100:]), 3)
mean_ep_length = np.round(np.mean(self.ep_lengths[-100:]), 3)
mean_ep_loss = np.round(np.mean(self.ep_avg_losses[-100:]), 3)
mean_ep_q = np.round(np.mean(self.ep_avg_qs[-100:]), 3)
self.moving_avg_ep_rewards.append(mean_ep_reward)
self.moving_avg_ep_lengths.append(mean_ep_length)
self.moving_avg_ep_avg_losses.append(mean_ep_loss)
self.moving_avg_ep_avg_qs.append(mean_ep_q)
last_record_time = self.record_time
self.record_time = time.time()
time_since_last_record = np.round(self.record_time - last_record_time, 3)
print(
f"Episode {episode} - "
f"Step {step} - "
f"Epsilon {epsilon} - "
f"Mean Reward {mean_ep_reward} - "
f"Mean Length {mean_ep_length} - "
f"Mean Loss {mean_ep_loss} - "
f"Mean Q Value {mean_ep_q} - "
f"Time Delta {time_since_last_record} - "
f"Time {datetime.datetime.now().strftime('%Y-%m-%dT%H:%M:%S')}"
)
with open(self.save_log, "a") as f:
f.write(
f"{episode:8d}{step:8d}{epsilon:10.3f}"
f"{mean_ep_reward:15.3f}{mean_ep_length:15.3f}{mean_ep_loss:15.3f}{mean_ep_q:15.3f}"
f"{time_since_last_record:15.3f}"
f"{datetime.datetime.now().strftime('%Y-%m-%dT%H:%M:%S'):>20}\n"
)
for metric in ["ep_lengths", "ep_avg_losses", "ep_avg_qs", "ep_rewards"]:
plt.clf()
plt.plot(getattr(self, f"moving_avg_{metric}"), label=f"moving_avg_{metric}")
plt.legend()
plt.savefig(getattr(self, f"{metric}_plot"))
开始玩吧!¶
在此示例中,我们运行训练循环 40 个回合,但要让马力欧真正学会他所在世界的玩法,我们建议运行循环至少 40,000 个回合!
use_cuda = torch.cuda.is_available()
print(f"Using CUDA: {use_cuda}")
print()
save_dir = Path("checkpoints") / datetime.datetime.now().strftime("%Y-%m-%dT%H-%M-%S")
save_dir.mkdir(parents=True)
mario = Mario(state_dim=(4, 84, 84), action_dim=env.action_space.n, save_dir=save_dir)
logger = MetricLogger(save_dir)
episodes = 40
for e in range(episodes):
state = env.reset()
# Play the game!
while True:
# Run agent on the state
action = mario.act(state)
# Agent performs action
next_state, reward, done, trunc, info = env.step(action)
# Remember
mario.cache(state, next_state, action, reward, done)
# Learn
q, loss = mario.learn()
# Logging
logger.log_step(reward, loss, q)
# Update state
state = next_state
# Check if end of game
if done or info["flag_get"]:
break
logger.log_episode()
if (e % 20 == 0) or (e == episodes - 1):
logger.record(episode=e, epsilon=mario.exploration_rate, step=mario.curr_step)
结论¶
在本教程中,我们展示了如何使用 PyTorch 训练一个玩游戏的 AI。你可以使用相同的方法来训练 AI 玩 OpenAI gym 中的任何游戏。希望你喜欢本教程,欢迎随时通过我们的 github 与我们联系!
脚本总运行时间: ( 0 分钟 0.000 秒)
