Transforms v2:端到端目标检测/分割示例¶
原生支持目标检测和分割任务:torchvision.transforms.v2 支持同时变换图像、视频、边界框和掩码。
本示例展示了一个使用来自 torchvision.datasets、torchvision.models 和 torchvision.transforms.v2 的 Torchvision 工具函数的端到端实例分割训练案例。此处涵盖的所有内容都可以类似地应用于目标检测或语义分割任务。
import pathlib
import torch
import torch.utils.data
from torchvision import models, datasets, tv_tensors
from torchvision.transforms import v2
torch.manual_seed(0)
# This loads fake data for illustration purposes of this example. In practice, you'll have
# to replace this with the proper data.
# If you're trying to run that on Colab, you can download the assets and the
# helpers from https://github.com/pytorch/vision/tree/main/gallery/
ROOT = pathlib.Path("../assets") / "coco"
IMAGES_PATH = str(ROOT / "images")
ANNOTATIONS_PATH = str(ROOT / "instances.json")
from helpers import plot
数据集准备¶
我们首先加载 CocoDetection 数据集,以查看它当前返回的内容。
dataset = datasets.CocoDetection(IMAGES_PATH, ANNOTATIONS_PATH)
sample = dataset[0]
img, target = sample
print(f"{type(img) = }\n{type(target) = }\n{type(target[0]) = }\n{target[0].keys() = }")
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
type(img) = <class 'PIL.Image.Image'>
type(target) = <class 'list'>
type(target[0]) = <class 'dict'>
target[0].keys() = dict_keys(['segmentation', 'iscrowd', 'image_id', 'bbox', 'category_id', 'id'])
Torchvision 数据集保留了数据集作者最初设计的数据结构和类型。因此,默认情况下,输出结构可能并非总是与模型或变换兼容。
为了解决这个问题,我们可以使用 wrap_dataset_for_transforms_v2() 函数。对于 CocoDetection,这将目标结构更改为单个包含列表的字典
type(img) = <class 'PIL.Image.Image'>
type(target) = <class 'dict'>
target.keys() = dict_keys(['boxes', 'masks', 'labels'])
type(target['boxes']) = <class 'torchvision.tv_tensors._bounding_boxes.BoundingBoxes'>
type(target['labels']) = <class 'torch.Tensor'>
type(target['masks']) = <class 'torchvision.tv_tensors._mask.Mask'>
我们使用 target_keys 参数指定我们感兴趣的输出类型。现在我们的数据集返回一个目标(target),它是一个字典,其值是 TVTensors(它们都是 torch.Tensor 的子类)。我们丢弃了之前输出中所有不必要的键,但如果您需要任何原始键(例如 “image_id”),仍然可以请求它。
注意
如果您只需要进行目标检测,则无需也不应在 target_keys 中传递“masks”:如果样本中存在掩码,它们将被变换,这会不必要地减慢您的变换速度。
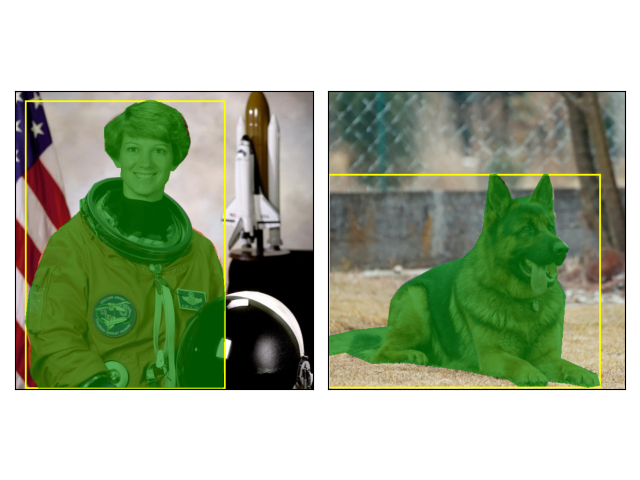
作为基线,让我们看一下没有应用变换的样本
plot([dataset[0], dataset[1]])
变换¶
现在让我们定义预处理变换。所有相关变换都知道如何处理图像、边界框和掩码。
变换通常作为数据集的 transforms 参数传递,以便它们可以利用 torch.utils.data.DataLoader 的多进程功能。
transforms = v2.Compose(
[
v2.ToImage(),
v2.RandomPhotometricDistort(p=1),
v2.RandomZoomOut(fill={tv_tensors.Image: (123, 117, 104), "others": 0}),
v2.RandomIoUCrop(),
v2.RandomHorizontalFlip(p=1),
v2.SanitizeBoundingBoxes(),
v2.ToDtype(torch.float32, scale=True),
]
)
dataset = datasets.CocoDetection(IMAGES_PATH, ANNOTATIONS_PATH, transforms=transforms)
dataset = datasets.wrap_dataset_for_transforms_v2(dataset, target_keys=["boxes", "labels", "masks"])
loading annotations into memory...
Done (t=0.00s)
creating index...
index created!
这里有几点值得注意
我们将 PIL 图像转换为 Tensor 对象。这不是严格必要的,但依赖于 Tensors(此处:Tensor 的子类)通常会更快。
我们调用
SanitizeBoundingBoxes以确保移除退化的边界框及其对应的标签和掩码。SanitizeBoundingBoxes至少应在检测流水线的末尾放置一次;如果使用了RandomIoUCrop,这一点尤其重要。
让我们看看应用了数据增强流水线的样本是什么样子
plot([dataset[0], dataset[1]])
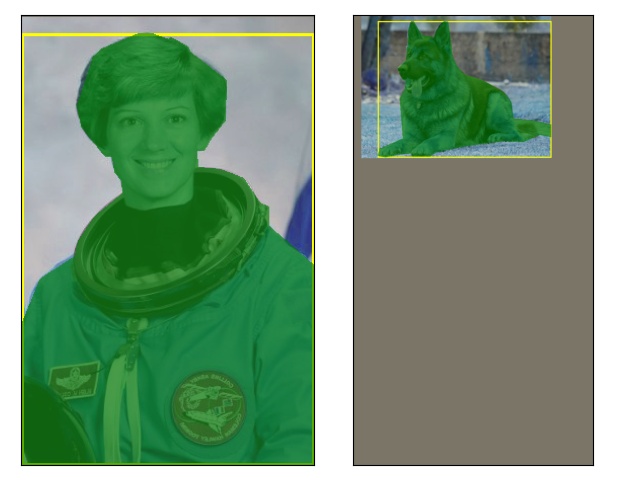
我们可以看到图像的颜色发生了扭曲、放大或缩小,并进行了翻转。边界框和掩码也相应地进行了变换。无需多言,我们可以开始训练了。
数据加载和训练循环¶
下面我们使用了 Mask-RCNN,这是一个实例分割模型,但本教程中涵盖的所有内容也适用于目标检测和语义分割任务。
data_loader = torch.utils.data.DataLoader(
dataset,
batch_size=2,
# We need a custom collation function here, since the object detection
# models expect a sequence of images and target dictionaries. The default
# collation function tries to torch.stack() the individual elements,
# which fails in general for object detection, because the number of bounding
# boxes varies between the images of the same batch.
collate_fn=lambda batch: tuple(zip(*batch)),
)
model = models.get_model("maskrcnn_resnet50_fpn_v2", weights=None, weights_backbone=None).train()
for imgs, targets in data_loader:
loss_dict = model(imgs, targets)
# Put your training logic here
print(f"{[img.shape for img in imgs] = }")
print(f"{[type(target) for target in targets] = }")
for name, loss_val in loss_dict.items():
print(f"{name:<20}{loss_val:.3f}")
[img.shape for img in imgs] = [torch.Size([3, 512, 512]), torch.Size([3, 409, 493])]
[type(target) for target in targets] = [<class 'dict'>, <class 'dict'>]
/opt/conda/envs/ci/lib/python3.10/site-packages/torch/_tensor.py:1128: UserWarning: Converting a tensor with requires_grad=True to a scalar may lead to unexpected behavior.
Consider using tensor.detach() first. (Triggered internally at /pytorch/aten/src/ATen/native/Scalar.cpp:22.)
return self.item().__format__(format_spec)
loss_classifier 4.721
loss_box_reg 0.006
loss_mask 0.734
loss_objectness 0.691
loss_rpn_box_reg 0.036
训练参考¶
接下来,您可以查阅 torchvision 参考实现,其中包含我们用于训练模型的实际训练脚本。
免责声明:我们的参考实现中的代码比您自己的用例所需的更复杂:这是因为我们支持不同的后端(PIL、tensors、TVTensors)和不同的变换命名空间(v1 和 v2)。因此,请随意简化,只保留您需要的部分。
脚本总运行时间: (0 分钟 4.821 秒)
