Rendezvous¶
在 Torch 分布式弹性中,我们使用术语“rendezvous”来指代一种特定功能,它将 **分布式同步** 原语与 **对等发现** 相结合。
Torch 分布式弹性使用它来收集训练作业的参与者(即节点),以便它们都同意相同的参与者列表和每个人的角色,并就何时开始/恢复训练做出一致的集体决策。
Torch 分布式弹性 rendezvous 提供以下关键功能
屏障:
执行 rendezvous 的节点将全部阻塞,直到 rendezvous 被认为完成 - 当至少 min 个节点加入 rendezvous 屏障(对于同一个作业)时,就会发生这种情况。这也意味着屏障不一定是固定大小的。
在达到 min 个节点后,还会有一个额外的短等待时间 - 这用于确保 rendezvous 不会“过快”完成(这可能会排除大约在同一时间尝试加入的额外节点)。
如果在屏障处收集到 max 个节点,则立即完成会合。
还存在一个总体超时,如果从未达到 min 个节点,则会导致会合失败 - 这旨在作为一种简单的故障安全机制,以帮助释放部分分配的作业资源,以防资源管理器出现问题,并且被解释为不可重试。
排他性:
简单的分布式屏障是不够的,因为我们还需要确保在任何给定时间(对于给定作业)只存在一个节点组。换句话说,新节点(即迟到的节点)不应该能够为同一作业形成一个并行的独立工作组。
Torch Distributed Elastic 会合确保,如果一组节点已经完成了会合(因此可能已经开始训练),那么尝试会合的额外“迟到”节点只会宣布自己处于等待状态,并且必须等到(先前完成的)现有会合被销毁后才能继续。
一致性:
当会合完成时,所有成员将就作业成员资格和每个成员在其中的角色达成一致。此角色使用一个整数表示,称为等级,介于 0 到世界大小之间。
请注意,等级是不稳定的,这意味着同一个节点可以在下一个(重新)会合中被分配不同的等级。
容错:
Torch Distributed Elastic 会合旨在容忍会合过程中的节点故障。如果一个进程在加入会合并完成会合之间崩溃(或失去网络连接等),那么将自动与剩余的健康节点进行重新会合。
节点也可以在完成会合之后(或被其他节点观察到已经完成会合)失败 - 此场景将由 Torch Distributed Elastic train_loop 处理(它也会触发重新会合)。
共享键值存储:
当 rendezvous 完成时,会创建一个共享的键值存储并返回。此存储实现了一个 torch.distributed.Store API(参见 分布式通信文档)。
此存储仅由已完成 rendezvous 的成员共享。它旨在由 Torch Distributed Elastic 用于交换初始化作业控制和数据平面所需的信息。
等待的 worker 和 rendezvous 关闭:
Torch Distributed Elastic rendezvous 处理程序对象提供额外的功能,这些功能在技术上不属于 rendezvous 过程
查询有多少 worker 在屏障处到达迟了,哪些 worker 可以参与下一个 rendezvous。
设置 rendezvous 已关闭以向所有节点发出信号,指示它们不要参与下一个 rendezvous。
DynamicRendezvousHandler:
Torch Distributed Elastic 带有 DynamicRendezvousHandler 类,该类实现了上述 rendezvous 机制。它是一种与后端无关的类型,期望在构造期间指定特定的 RendezvousBackend 实例。
Torch 分布式用户可以实现自己的后端类型,也可以使用 PyTorch 附带的以下实现之一
C10dRendezvousBackend: 使用 C10d 存储(默认情况下为TCPStore)作为 rendezvous 后端。使用 C10d 存储的主要优点是它不需要任何第三方依赖项(例如 etcd)来建立 rendezvous。EtcdRendezvousBackend: 取代了旧的EtcdRendezvousHandler类。将EtcdRendezvousBackend实例传递给DynamicRendezvousHandler在功能上等同于实例化一个EtcdRendezvousHandler。store = TCPStore("localhost") backend = C10dRendezvousBackend(store, "my_run_id") rdzv_handler = DynamicRendezvousHandler.from_backend( run_id="my_run_id", store=store, backend=backend, min_nodes=2, max_nodes=4 )
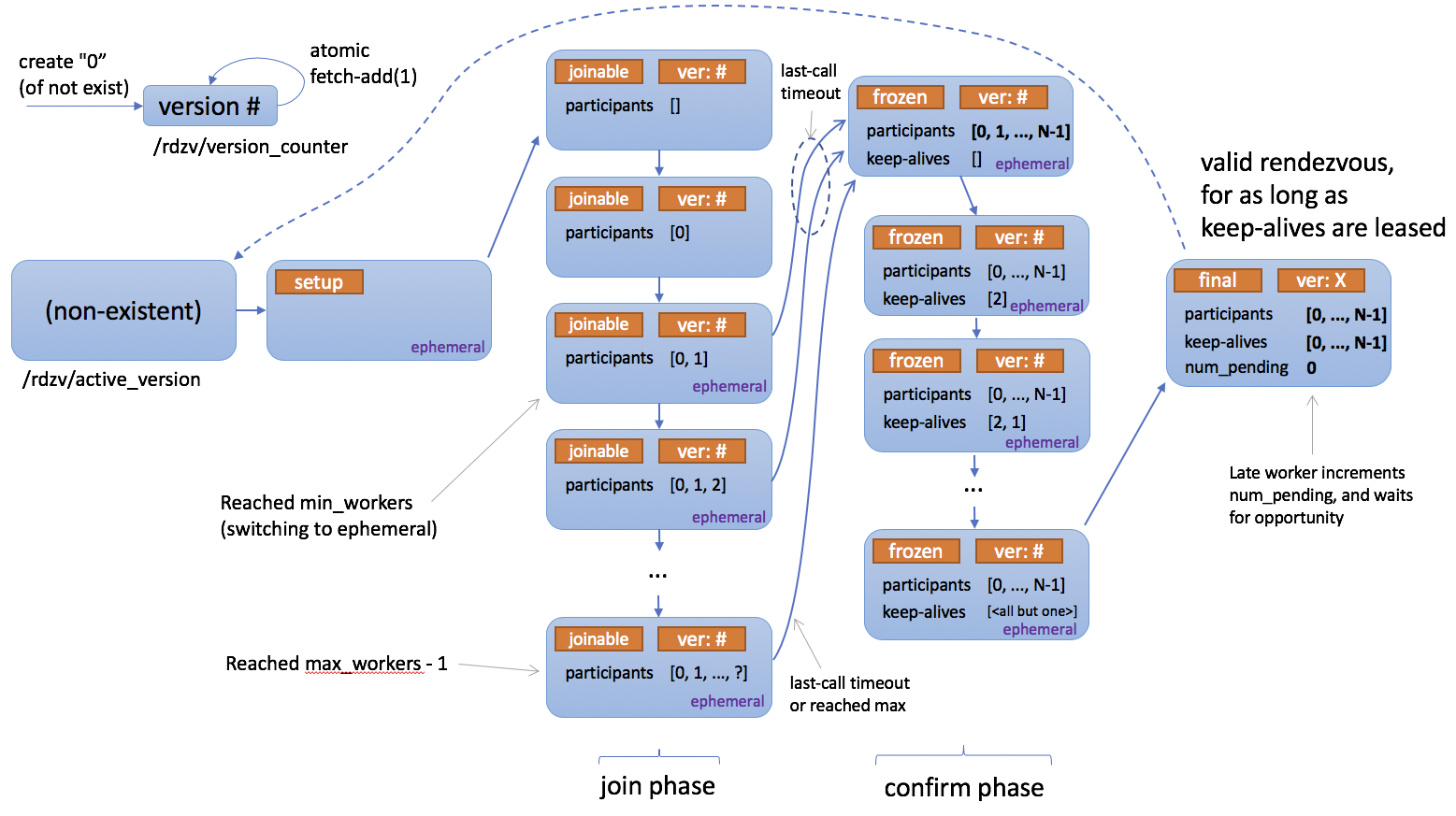
以下是描述 Rendezvous 工作原理的状态图。
注册表¶
- class torch.distributed.elastic.rendezvous.RendezvousParameters(backend, endpoint, run_id, min_nodes, max_nodes, local_addr=None, **kwargs)[source]¶
保存用于构建
RendezvousHandler的参数。- 参数
- class torch.distributed.elastic.rendezvous.RendezvousHandlerRegistry[source]¶
表示
RendezvousHandler后端的注册表。- create_handler(params)[source]¶
创建一个新的
RendezvousHandler。- 返回类型
- register(backend, creator)[source]¶
注册新的 rendezvous 后端。
- 参数
backend (str) – 后端的名称。
creator (Callable[[RendezvousParameters], RendezvousHandler]) – 用于构造
RendezvousHandler的回调函数。
Handler¶
- class torch.distributed.elastic.rendezvous.RendezvousHandler[source]¶
主要的 rendezvous 接口。
注意
分布式 Torch 用户通常 **不需要** 实现自己的
RendezvousHandler。 基于 C10d Store 的实现已经提供,并且推荐大多数用户使用。- abstract get_run_id()[source]¶
返回 rendezvous 的运行 ID。
运行 ID 是用户定义的 ID,用于唯一标识分布式应用程序的实例。它通常映射到作业 ID,并用于允许节点加入正确的分布式应用程序。
- 返回类型
- abstract is_closed()[source]¶
检查 rendezvous 是否已关闭。
关闭的 rendezvous 表示所有未来尝试在同一作业内重新 rendezvous 都会失败。
is_closed()和set_closed()具有最终传播的语义,不应用于同步。意图是,如果至少一个节点决定作业已完成,它将关闭 rendezvous,其他节点很快就会观察到这一点并停止运行。- 返回类型
- abstract next_rendezvous()[source]¶
rendezvous 障碍的主要入口点。
阻塞,直到 rendezvous 完成并且当前进程包含在已形成的 worker 组中,或者超时发生,或者 rendezvous 被标记为已关闭。
- 返回值
一个包含
torch.distributed.Store、rank和world size的元组。- 引发
RendezvousClosedError – rendezvous 已关闭。
RendezvousConnectionError – 与 rendezvous 后端的连接失败。
RendezvousStateError – rendezvous 状态已损坏。
RendezvousTimeoutError – rendezvous 未及时完成。
- 返回类型
- abstract num_nodes_waiting()[source]¶
返回在集合点屏障到达过晚的节点数量,因此未包含在当前工作组中。
调用者应定期调用此方法以检查是否有新节点正在等待加入作业,如果有,则通过调用
next_rendezvous()(重新集合)来接纳它们。- 返回类型
异常¶
- class torch.distributed.elastic.rendezvous.RendezvousTimeoutError[source]¶
当 rendezvous 未能在规定时间内完成时引发。
实现¶
动态 Rendezvous¶
- torch.distributed.elastic.rendezvous.dynamic_rendezvous.create_handler(store, backend, params)[source]¶
从指定的参数创建一个新的
DynamicRendezvousHandler。- 参数
store (Store) – 作为 rendezvous 部分返回的 C10d 存储。
backend (RendezvousBackend) – 用于保存 rendezvous 状态的后端。
- 返回类型
参数
描述
join_timeout
预计完成集合的时间(以秒为单位)。默认值为 600 秒。
last_call_timeout
在达到最小节点数后,完成集合之前的额外等待时间(以秒为单位)。默认值为 30 秒。
close_timeout
在调用
RendezvousHandler.set_closed()或RendezvousHandler.shutdown()后,预计集合关闭的时间(以秒为单位)。默认值为 30 秒。
- class torch.distributed.elastic.rendezvous.dynamic_rendezvous.DynamicRendezvousHandler[source]¶
表示一个处理程序,它在节点集之间建立集合。
- classmethod from_backend(run_id, store, backend, min_nodes, max_nodes, local_addr=None, timeout=None)[source]¶
创建一个新的
DynamicRendezvousHandler.- 参数
run_id (str) – 集合的运行 ID。
store (Store) – 作为 rendezvous 部分返回的 C10d 存储。
backend (RendezvousBackend) – 用于保存 rendezvous 状态的后端。
min_nodes (int) – 允许加入 Rendezvous 的最小节点数。
max_nodes (int) – 允许加入 Rendezvous 的最大节点数。
timeout (Optional[RendezvousTimeout]) – 集合的超时配置。
- class torch.distributed.elastic.rendezvous.dynamic_rendezvous.RendezvousBackend[source]¶
表示保存 rendezvous 状态的后端。
- abstract get_state()[source]¶
获取 rendezvous 状态。
- 返回值
一个包含编码后的 rendezvous 状态和其围栏令牌的元组,如果后端中没有找到状态,则为
None。- 引发
RendezvousConnectionError – 与后端的连接失败。
RendezvousStateError – rendezvous 状态已损坏。
- 返回类型
- abstract set_state(state, token=None)[source]¶
设置 rendezvous 状态。
新的 rendezvous 状态将有条件地设置。
如果指定的
token与后端存储的围栏令牌匹配,则状态将更新。新状态将与它的围栏令牌一起返回给调用者。如果指定的
token与后端存储的围栏令牌不匹配,则状态不会更新;相反,现有状态及其围栏令牌将返回给调用者。如果指定的
token为None,则只有在后端不存在现有状态时才会设置新状态。新状态或现有状态及其围栏令牌将返回给调用者。
- 参数
state (bytes) – 编码后的 rendezvous 状态。
token (Optional[Any]) – 一个可选的围栏令牌,它是由先前对
get_state()或set_state()的调用检索到的。
- 返回值
序列化 rendezvous 状态、其围栏令牌和一个布尔值元组,指示我们的设置尝试是否成功。
- 引发
RendezvousConnectionError – 与后端的连接失败。
RendezvousStateError – rendezvous 状态已损坏。
- 返回类型
- class torch.distributed.elastic.rendezvous.dynamic_rendezvous.RendezvousTimeout(join=None, last_call=None, close=None, heartbeat=None)[source]¶
保存 rendezvous 的超时配置。
- 参数
C10d 后端¶
- torch.distributed.elastic.rendezvous.c10d_rendezvous_backend.create_backend(params)[source]¶
从指定的参数创建一个新的
C10dRendezvousBackend。参数
描述
store_type
C10d 存储的类型。当前支持的类型是“tcp”和“file”,分别对应于
torch.distributed.TCPStore和torch.distributed.FileStore。默认值为“tcp”。read_timeout
存储操作的读取超时时间(以秒为单位)。默认值为 60 秒。
请注意,这仅适用于
torch.distributed.TCPStore。它与torch.distributed.FileStore无关,因为torch.distributed.FileStore不接受超时时间作为参数。is_host
一个布尔值,指示此后端实例是否将托管 C10d 存储。如果未指定,它将通过将此机器的主机名或 IP 地址与指定的 rendezvous 端点进行匹配来启发式地推断。默认值为
None。请注意,此配置选项仅适用于
torch.distributed.TCPStore。在正常情况下,您可以安全地跳过它;只有当其值无法正确确定时才需要它(例如,rendezvous 端点具有 CNAME 作为主机名或与机器的 FQDN 不匹配)。- 返回类型
- class torch.distributed.elastic.rendezvous.c10d_rendezvous_backend.C10dRendezvousBackend(store, run_id)[source]¶
表示一个 C10d 支持的 rendezvous 后端。
- 参数
store (Store) – 用于与 C10d 存储进行通信的
torch.distributed.Store实例。run_id (str) – 集合的运行 ID。
Etcd 后端¶
- torch.distributed.elastic.rendezvous.etcd_rendezvous_backend.create_backend(params)[source]¶
从指定的参数创建一个新的
EtcdRendezvousBackend。参数
描述
read_timeout
etcd 操作的读取超时时间(以秒为单位)。默认值为 60 秒。
protocol
用于与 etcd 通信的协议。有效值为“http”和“https”。默认值为“http”。
ssl_cert
用于 HTTPS 的 SSL 客户端证书路径。默认值为
None。ssl_cert_key
用于 HTTPS 的 SSL 客户端证书私钥路径。默认值为
None。ca_cert
根 SSL 颁发机构证书路径。默认值为
None。- 返回类型
Etcd Rendezvous(遗留)¶
警告
DynamicRendezvousHandler 类已取代 EtcdRendezvousHandler 类,建议大多数用户使用。 EtcdRendezvousHandler 处于维护模式,将在未来弃用。
- class torch.distributed.elastic.rendezvous.etcd_rendezvous.EtcdRendezvousHandler(rdzv_impl)[source]¶
实现一个由
torch.distributed.elastic.rendezvous.etcd_rendezvous.EtcdRendezvous支持的torch.distributed.elastic.rendezvous.RendezvousHandler接口。EtcdRendezvousHandler使用 URL 来配置要使用的 rendezvous 类型,并将特定于实现的配置传递给 rendezvous 模块。 基本的 etcd rendezvous 配置 URL 如下所示etcd://<etcd_address>:<port>/<job_id>?min_workers=<min_workers>&max_workers=<max_workers> # noqa: W605 -- example -- etcd://:2379/1234?min_workers=1&max_workers=3
上面的 URL 解释如下
使用注册到
etcd方案的 rendezvous 处理程序要使用的
etcd端点是localhost:2379job_id == 1234用作 etcd 中的前缀(这允许人们为多个作业共享一个公共 etcd 服务器,只要job_ids保证是唯一的)。 请注意,作业 ID 可以是任何字符串(例如,不需要是数字),只要它是唯一的。min_workers=1和max_workers=3指定了成员大小的范围 - Torch Distributed Elastic 只要集群大小大于或等于min_workers就会开始运行作业,并最多允许max_workers加入集群。
以下是可以传递给 etcd rendezvous 的所有参数列表
参数
描述
min_workers
rendezvous 有效的最小工作进程数
max_workers
允许加入的最大工作进程数
timeout
预期 next_rendezvous 成功所需的总超时时间(默认 600 秒)
last_call_timeout
达到最小工作进程数后额外的等待时间(“最后一次呼叫”)(默认为 30 秒)
etcd_prefix
路径前缀(从 etcd 根目录开始),所有 etcd 节点都将在其中创建(默认为
/torchelastic/p2p)
Etcd Store¶
当 etcd 用作 rendezvous 后端时,EtcdStore 是 next_rendezvous() 返回的 C10d Store 实例类型。
- class torch.distributed.elastic.rendezvous.etcd_store.EtcdStore(etcd_client, etcd_store_prefix, timeout=None)[source]¶
通过 piggybacking 在 rendezvous etcd 实例上实现 c10 Store 接口。
这是
EtcdRendezvous返回的存储对象。
Etcd 服务器¶
The EtcdServer 是一个方便的类,它使您能够轻松地在子进程上启动和停止 etcd 服务器。这对于测试或单节点(多工作器)部署很有用,在这些部署中,在侧面手动设置 etcd 服务器很麻烦。
警告
对于生产和多节点部署,请考虑适当地部署高可用性 etcd 服务器,因为这是分布式作业的单点故障。
- class torch.distributed.elastic.rendezvous.etcd_server.EtcdServer(data_dir=None)[source]¶
注意
在 etcd 服务器 v3.4.3 上测试。
在随机空闲端口上启动和停止本地独立 etcd 服务器。对于单节点、多工作器启动或测试很有用,在这些情况下,与单独设置 etcd 服务器相比,侧边车 etcd 服务器更方便。
此类注册一个终止处理程序,以便在退出时关闭 etcd 子进程。此终止处理程序不是调用
stop()方法的替代方法。使用以下回退机制查找 etcd 二进制文件
使用环境变量 TORCHELASTIC_ETCD_BINARY_PATH
如果存在,则使用
<this file root>/bin/etcd从
PATH中使用etcd
用法
server = EtcdServer("/usr/bin/etcd", 2379, "/tmp/default.etcd") server.start() client = server.get_client() # use client server.stop()
- 参数
etcd_binary_path – etcd 服务器二进制文件的路径(有关回退路径,请参见上文)
